You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
@@ -189,10 +197,10 @@ Set the thottle and steering of the car by adding
189
197
>2. Steering value Range : [-100,100] - "0 is Center"
190
198
191
199
```python
192
-
#Set the speed of the car
200
+
#Set the speed of the car (This will not set the actual speed of the car, thus to achieve a certain speed, checking the speed feedback is required.)
193
201
car.setSpeed(50)
194
202
195
-
#Set the steering of the car
203
+
#Set the steering of the car
196
204
car.setSteering(0)
197
205
```
198
206
@@ -211,7 +219,7 @@ image = car.getImage()
211
219
carSpeed = car.getSpeed()
212
220
```
213
221
214
-
warning "It's highly recommended to add your Algorithms to the Example.py Code."
222
+
Warning "It's highly recommended to add your Algorithms to the example.py Code."
215
223
216
224
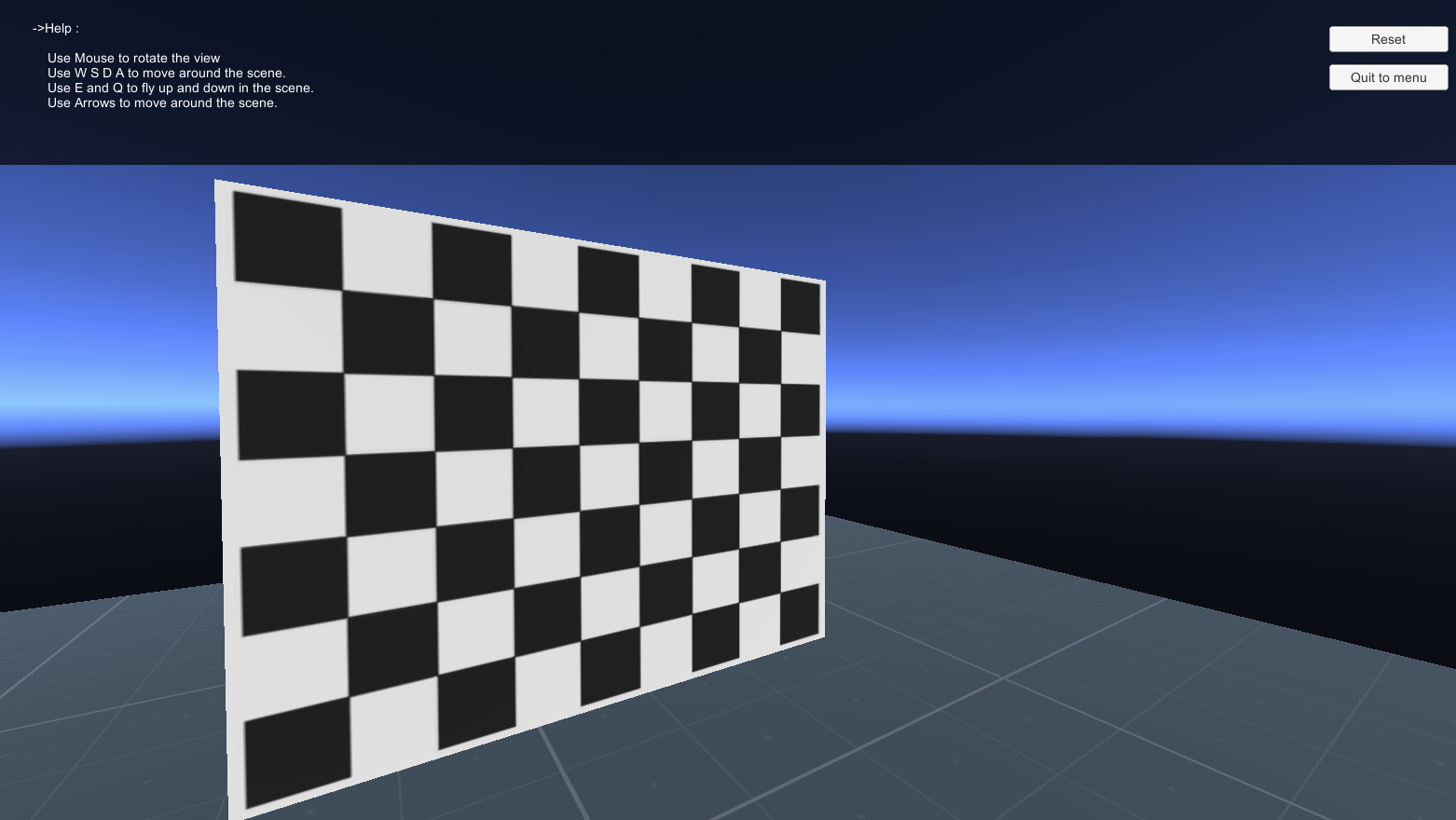
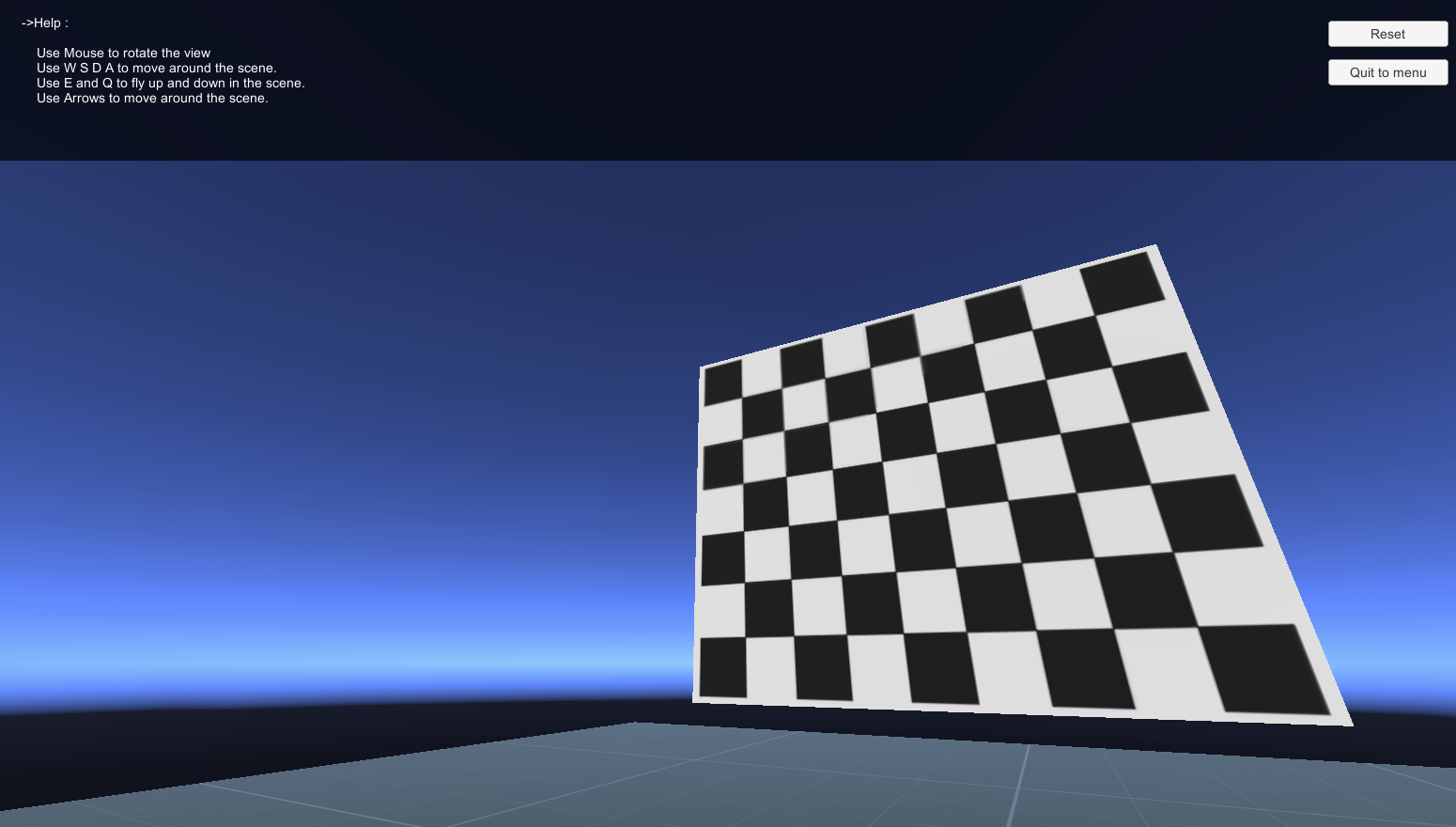
# Calibrate your Camera (Version 1.0.5 or higher).
217
225
You can calibrate your camera with a Simulated Checkerboard.
@@ -221,4 +229,4 @@ Camera Calibration Test 1 | Camera Calibration Test 2
221
229
 | 
0 commit comments