Download the repository or git clone https://github.com/AfterAStorm/MechControlCalculator.git
Run __main__.pyw via your prefered method
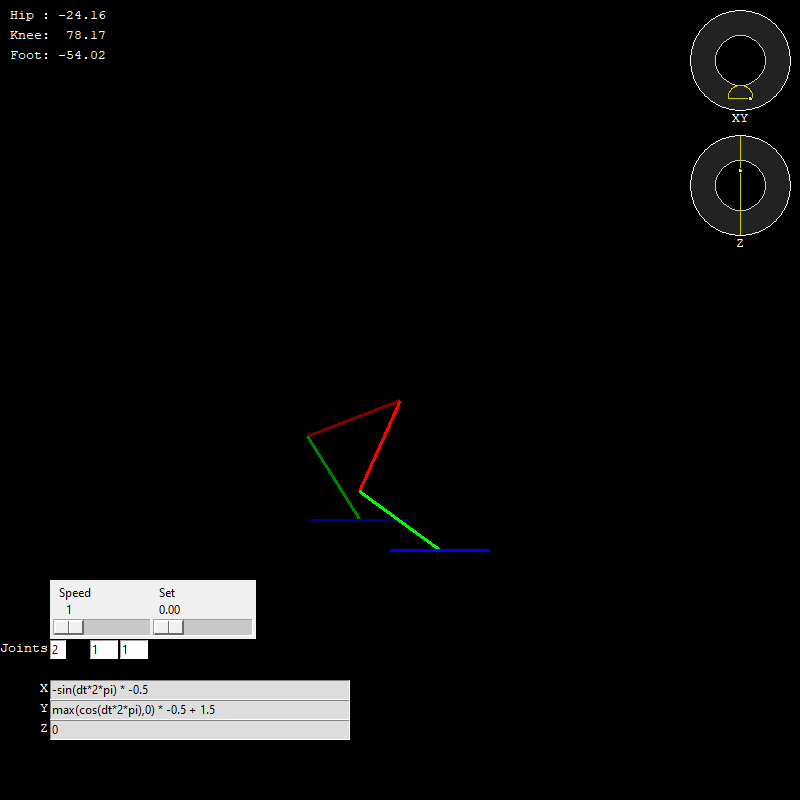
- Edit X, Y, and Z calculations via the entries
- See visualizations in the middle and top right corner
- Edit time scale/step with the two sliders respectively
+-> You'll never add this up--> Subtraction*-> Multiplication/-> Division^-> Pow, to the power of
Variables to use in equations
-
dt-> delta time, the current time, goes from0 - 1, forever, snapping from 1 to 0 each loop -
pi-> pi -
tau-> pi * 2
-
findKnee(angle)(angle: radians) -> find the y value to make the knee angle exactlyangle -
sin(angle)(angle: radians) -> sine -
cos(angle)(angle: radians) -> cosine -
tan(angle)(angle: radians) -> tangent -
asin(angle)(x: ratio) -> arcsine -
acos(angle)(x: ratio) -> arccosine -
atan(angle)(x: ratio) -> arctangent -
asinh(angle)(x: ratio) -> hyperbolic arcsine -
acosh(angle)(x: ratio) -> hyperbolic arccosine -
atanh(angle)(x: ratio) -> hyperbolic arctangent -
atan2(y, x)(y & x: number) -> arctanget of y/x, signs are considered (lookup python3 atan2) -
ceil(x)(x: number) -> round ceiling aka round up -
floor(x)(x: number) -> round floor aka round down -
sqrt(x)(x: number) -> square root -
sign(x)(x: number) -> the sign of the number- >0 = 1
- 0 = 0
- <0 = -1
-
pow(x, y)(x & y: number) -> x to the power of y, same asx ^ y -
max(x, y)(x & y: number) -> the maximum of two numbers -
min(x, y)(x & y: number) -> the minimum of two numbers -
deg(rad)(rad: radians) -> convert radians to degrees akarad * (180 / pi) -
rad(deg)(deg: degrees) -> convert degrees to radians akadeg * (pi / 180)